
















EC機器人一鍵回原
2025-05-27
1、簡介
一個項目中,如果有一個較好的回原邏輯,能夠省下較多的啟動時間,也能避免機構干涉問題。想要有個安全、有效的回原邏輯,需要我們對項目的工藝流程要足夠了解。
2.操作流程
2.1利用干涉區功能回原:
以下圖為例,將工作區域分為四個干涉區,以下圖機器人位置為Home點,會在四個干涉區中進行產品的取放,最終作業結束后會回到Home點。
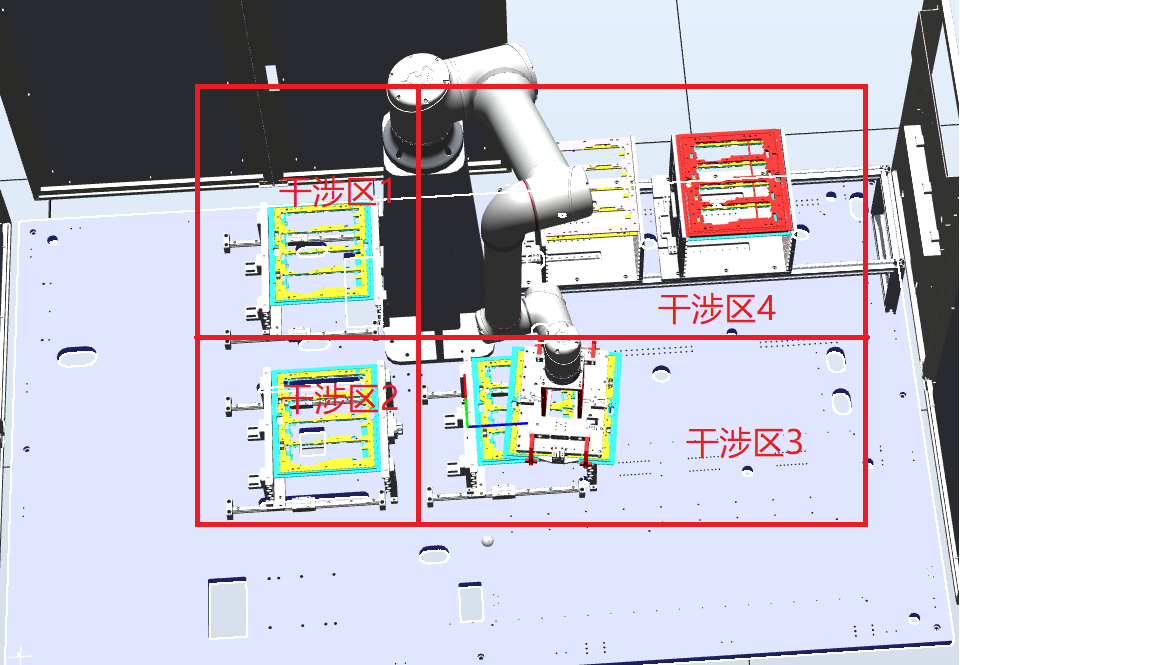
做一鍵回原,首先需要考慮機構干涉問題,以下就幾種常見的工作環境,做簡要說明。
2.1.1 在干涉區內回原
以上圖的項目環境為例,機器人在工作區里啟動,可以從當前位置啟動,可以直線上升無干涉風險。
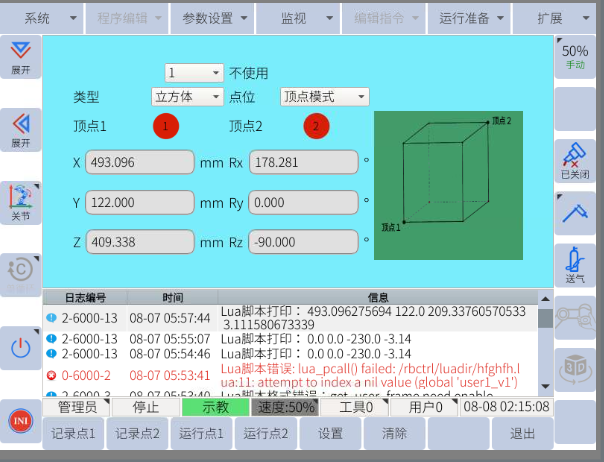
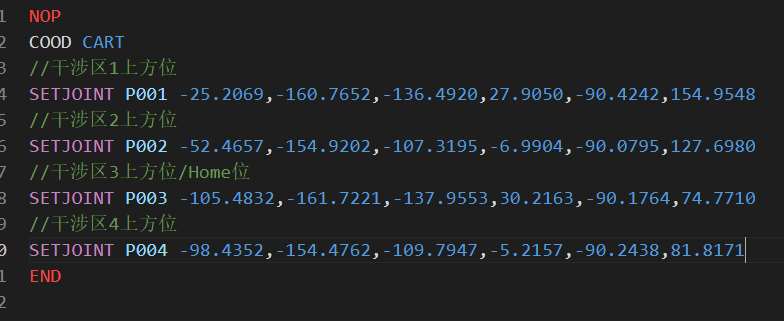
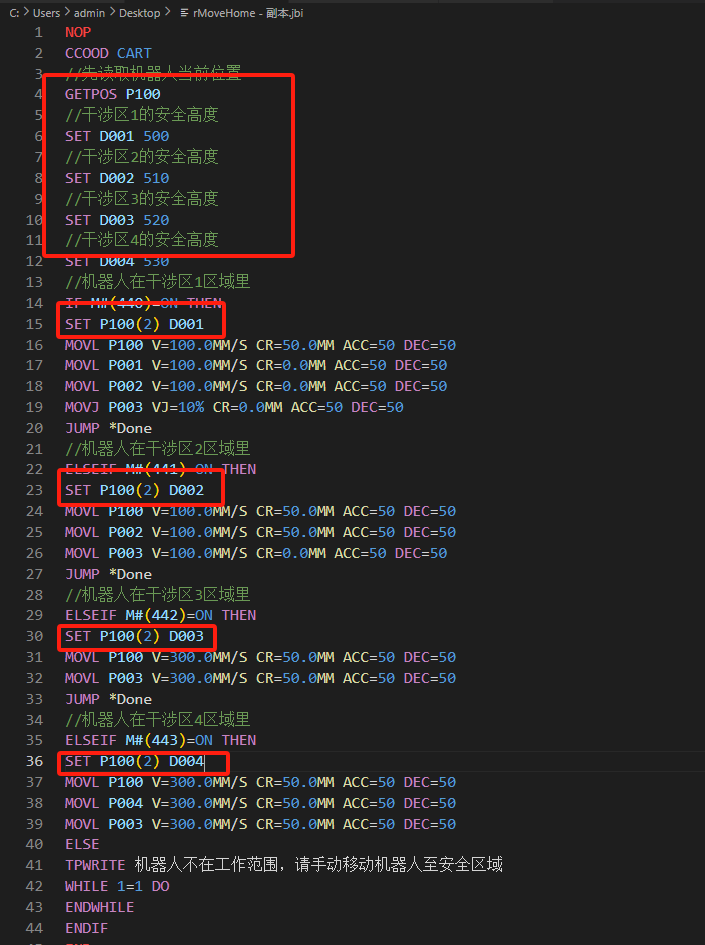
方式一:上升到各個區域上位安全位置高度,需要手動示教各個干涉區的上方安全位
方式二:指定各個區域的安全高度,需要手動寫程序賦值,或者由上位機控制,這里以手動程序賦值為例。
2.1.2 不在干涉區內回原
不在干涉區暫時無法規劃路徑,故不能依靠干涉區回原,若在運行過程中出現機器人停止在干涉區之外且在工作范圍之內,需要重新規劃相關干涉區
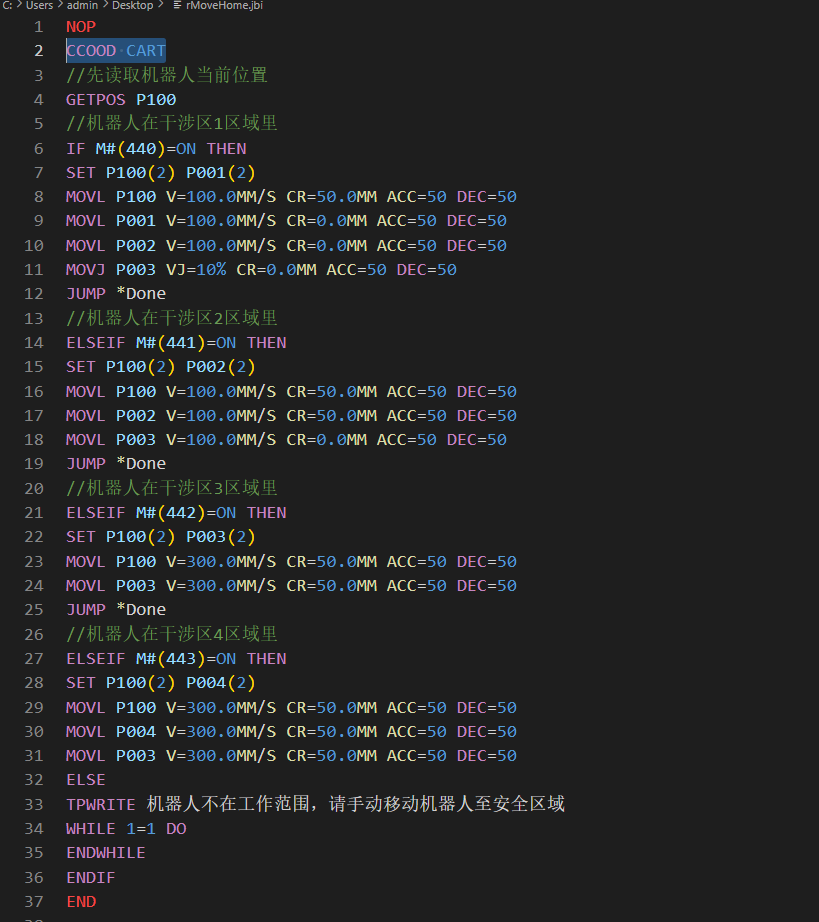
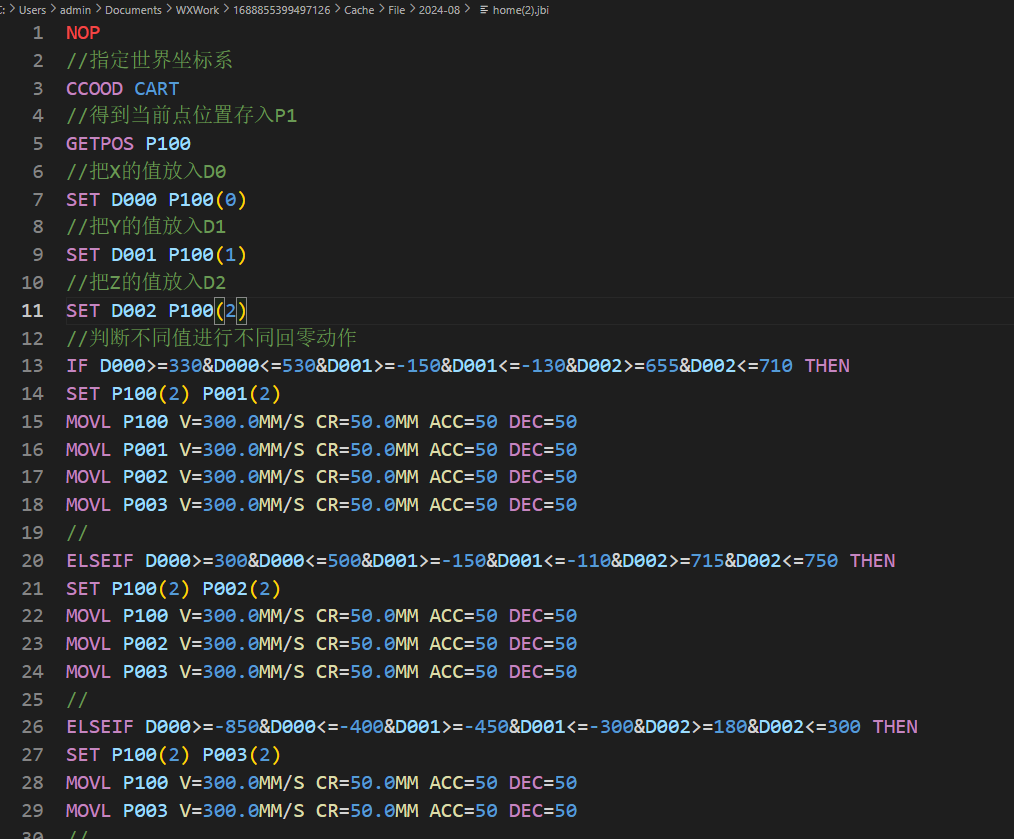
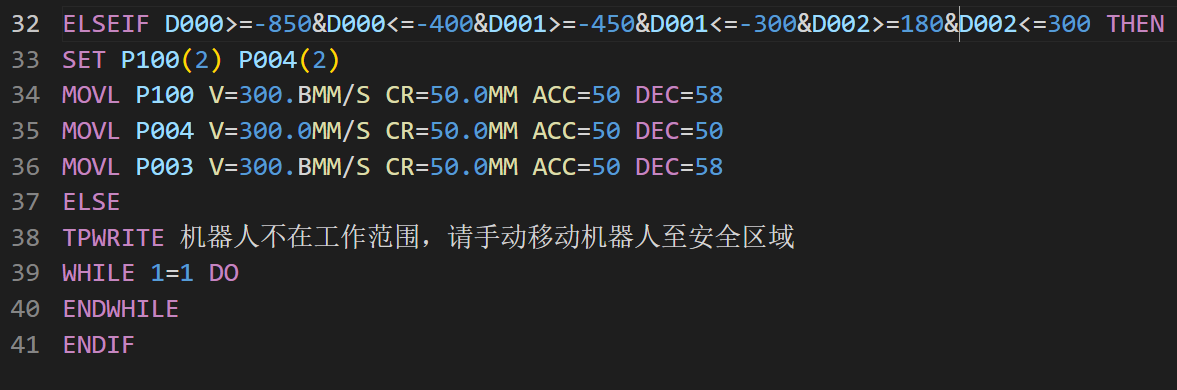
2.2.利用判斷機器人的實時位置回原
根據實時位置賦值判斷當前位置的空間范圍,來實現回原目的
3.常見問題解答
本文舉例以工具末端始終垂直于地面,現場作業過程中,機器人末端可能存在多種姿態,需要依照現場作業環境做出實時更改,切不可完全參照本文舉例。比如現場機器人存在末端RX或RY較對齊姿態旋轉了90°,上升時可能會存在末端干涉問題。


























